Project leader:
Project members: , ,
Start date: 1. January 2021
End date: 31. March 2022
Funding source: Fraunhofer-Gesellschaft
Abstract
Human movement is a complex process that depends on many factors such as body constitution, health condition, but also external factors. Joint angles, joint moments and muscle forces are variables quantifying the movement to give valuable insights about these factors. Simulation of musculoskeletal models can be used to perform detailed movement analysis to obtain these variables. The application of simulation is two-fold: Reconstruction of measured motion and prediction of new motion. Motion reconstruction can give valuable insights for example for sports analysis in marathon runners or medical gait assessment of Parkinson’s patients. Simulation can predict changes in human motion in response to environmental changes. This is beneficial to, for instance, support virtual product design of footwear or below-knee prostheses.
However, for accurate and detailed simulations, the personalization of musculoskeletal models is crucial. Precise scaling of segment and muscle parameters can be achieved using magnetic resonance imaging (MRI) which requires time and cost consuming measurements additionally to the movement acquisition and expert knowledge. State-of-the-art methods relying only on movement recordings scale segment parameters and muscle attachment points. But they do not scale muscle parameters like maximum isometric forces.
We will combine optimal control simulation with the application of advanced machine learning methods to personalize segment as well as muscle parameters based on marker and ground reaction force. The goal is to make personalized simulations feasible in healthcare, sports science, and industrial practice. To this end, we aim at developing an approach with three key improvements: First, it can be applied without additional and time-consuming measurements using expensive modalities; Secondly, it can be used without expert knowledge but operates automatically; Thirdly, it is feasible with limited computational re-sources, i.e., computational power and time.
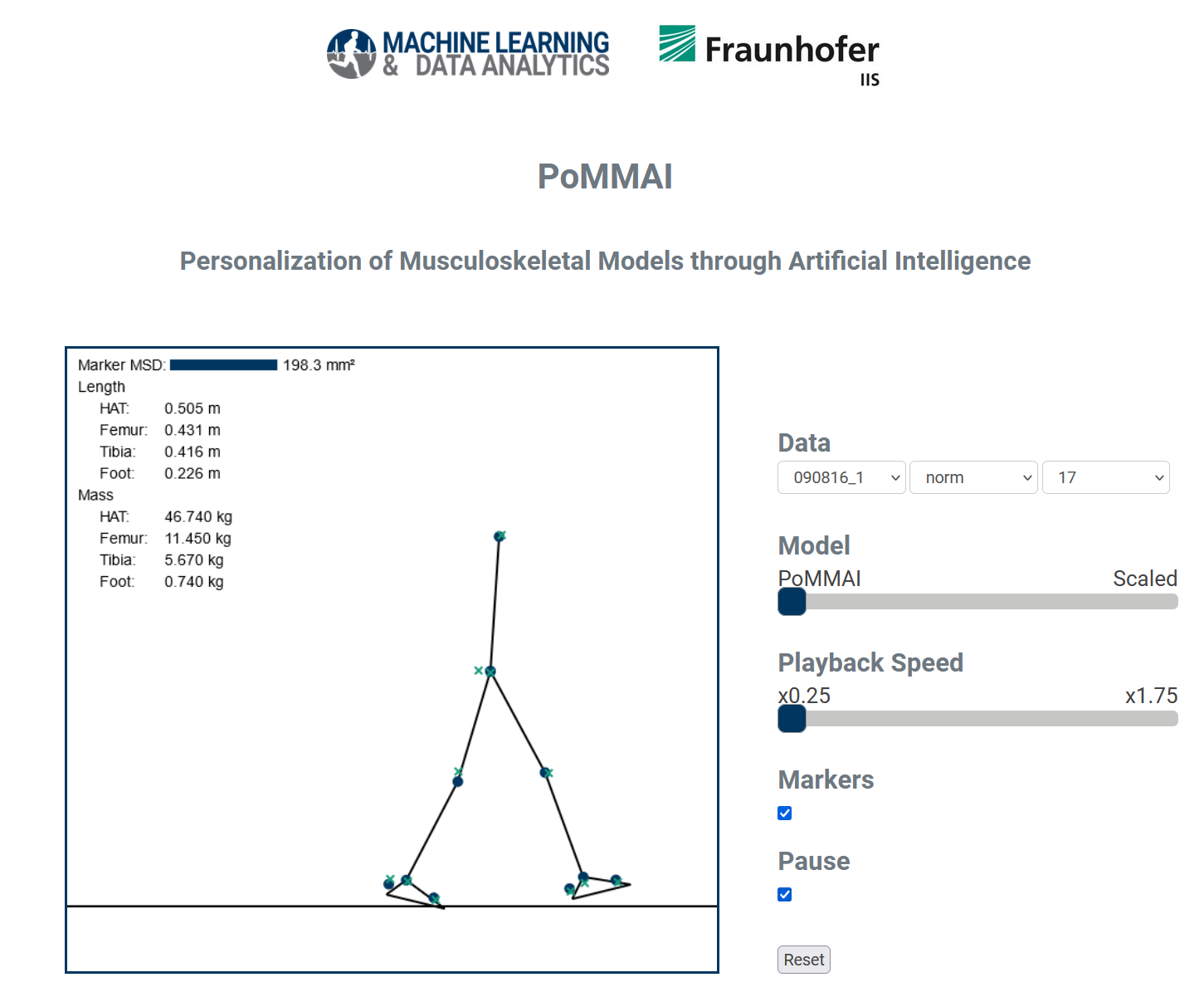
Demo
Publications
- , , , , :
Change the direction: 3D optimal control simulation by directly tracking marker and ground reaction force data
In: PeerJ (2023)
ISSN: 2167-8359
DOI: 10.7717/peerj.14852
URL: https://peerj.com/articles/14852/
- , , :
3D full-body optimal control simulations with change of direction directly driven by motion capture data
17th International Symposium of 3-D Analysis of Human Movement (3D-AHM) (Tokyo, Japan, 16. July 2022 - 19. July 2022)
URL: https://www.youtube.com/watch?v=3ZFwDhZqZPU
- , , , :
Can we combine data sets? Feature extraction and clustering motion capture data
17th International Symposium of 3-D Analysis of Human Movement (3D-AHM) (Tokyo, Japan, 16. July 2022 - 19. July 2022)